News
Maker Faire 2023
Our lab participated at the Maker Faire Rome 2023, held in Fiera di Roma from 20 to 22 October 2022, with the CANOPIES project and the SPQR Team of Robot Soccer Players !
For CANOPIES, benefits of a collaboration between humans and robots in table grape vineyards have been discussed and demonstrated by 3 italian universities involved in the project: Sapienza, Roma3 and UNICAS. A virtual reality immersive experience, as a human worker in the table grape vineyard, has been enjoyed by many people.
CANOPIES Team at Maker Faire 2023

The SPQR Team of Robot Soccer Players has been involved in several matches against Nao Devils TU Dortmund Team and HULKs Team, arousing curiosity and interest in visitors with different ages, from children to elderly people.
SPQR, HULKs and Nao Devils Teams at Maker Faire 2023


Maker Faire 2022
Our lab participated at the Maker Faire Rome 2022, held in Gazometro Ostiense from 7 to 9 October 2022, with the CANOPIES project and the SPQR Team of Robot Soccer Players !
For CANOPIES, benefits of a collaboration between humans and robots in table grape vineyards have been discussed and demonstrated by 3 italian universities involved in the project: Sapienza, Roma3 and UNICAS. A virtual reality immersive experience, as a human worker in the table grape vineyard, has been enjoyed by many people, thanks to PaleBlue, Norvegian partner of the project, that helped us at the Maker Faire.
CANOPIES Team at Maker Faire 2022

The SPQR Team of Robot Soccer Players has been involved in several matches against Nao Devils TU Dortmund Team, arousing curiosity and interest in visitors with different ages, from children to elderly people.
SPQR Team at Maker Faire 2022

Maker Faire 2021
We are in Maker Faire Rome 2021 IX edition from 8 October to 10 October, 2021!

The 2nd SciRoc Challenge
The 2nd Smart City Robotics challenge has been held in Bologna (Italy) from 6 September to 11 September, 2021!
This is the first physical event organized by our lab after COVID-19!
Thanks a lot to all organizers and staffs for making our event so succesfully.

Best Paper Award
The 24th RoboCup International Symposium has been held in conjunction with RoboCup 2021 in a purely online setting, from 22 June to 28 June 2021.
Emanuele Anotnioni, Vincenzo Suriani, Filippo Solimando, Domenico Daniele Bloisi and Daniele Nardi are the winners of Robocup 2021 Best paper award!
The paper Learning form the Crowd: Improving the Decision Making Process in Robot Soccer using the Audience Noise has a notable contribution in new application methology for Robocup.
Announcement
Due to Covid-19 Emergency, many activities and programs of lab have been postponed, canceled or transformed as online activites.
Please follow us on our website for further updating!
Sapori Segreti 2019
Peppino, Nao and UAV participated in Sapori Segreti 2019 (https://saporisegreti.it/) from November 30th, 2019 to Decembre 2rd, 2019 !!!
Our lab members brought the agricolture projects and two social robots to Sapori Segreti 2019.

Maker Faire 2019
Our lab have participated Maker Faire 2019 from October 18th to October 20th, 2019!
The novelty of this year is that Maker faire 2019 have organized a mini SPL tournament which three teams have participated: SPQR, HTWK Nao and NomandZ!

Soccer Team has been reported in Newspapers
Congratulations to our SPQR SOCCER team members, they have been reported and appreciated by Italian newspapers.
Find the newspaper "TUTTO SPORT" article on November 10th, 2019 and the magazine "Oggi" article on July 4th, 2019.


IROS 2019
Our lab members have presented three full papers at IROS 2019 in Macao, China! (https://www.iros2019.org/)
Congratulations to Tiziano Guadagnino, Lorenzo Brigato and Mirco Colosi!!!
The titles are listed as follows:
"Low cost sonar navigation system" - T. Guadanino, B. Della Corte, G. Grisetti;
"A Comparative Analysis on the use of Autoencoders for Robot Security Anomaly Detection" - M. Olivato, O. Cotugno, L. Brigato, D. Bloisi, A. Farinelli, L. Iocchi
"Better lost in Transition than lost in Space: SLAM state machine" - M. Colosi, S. Hang, P. Biber, K.O.Arras, G.Grisetti.
SciRoc 2019
We are in the first ERL Smart CIty RObotic Challenge (the SciRoc challenge) in Milton Keynes (UK) from September 16th to September 22nd, 2019!!! (https://sciroc.eu/)

RomeCup 2019
The event had been held at Rome Tre University and in Campidoglio from April 2nd to April 5th (https://romecup.org/), which hosted the RoboCup Junior Official competiongs that allowed a demostration of our RoboCup team (SPQR team).


Maker Faire 2018
Our Lab will join the Maker Faire 2018: https://2018.makerfairerome.eu/it/
Service Robot Competition
Soon in Peccioli! From January 30th to February 3rd.
Our Team: https://sites.google.com/a/dis.uniroma1.it/spqrel/
Newspapers talking about us: http://www.pisatoday.it/cronaca/gara-robot-casa-domotica-peccioli-santanna.html
EUROPEAN ROBOTICS WEEK
On November 23rd, 2016, in the context of the European Robotics Week 2016, the Department of Computer, Control, and Management Engineering opens its robotics laboratories.
We will illustrate our research activities on articulated manipulators, mobile robots, humanoids, autonomous flying vehicles and soccer robots.
Program
10:00 Presentation of research activity – Aula Magna
Robotics Lab: http://www.diag.uniroma1.it/~labrob
Cognitive Cooperating Robots Lab (RoCoCo): http://www.diag.uniroma1.it/~labrococo
Cognitive Robotics Lab (ALCOR): http://www.diag.uniroma1.it/~alcor
11:00 - 13:00 Guided tour of the labs
Contact: Domenico D. Bloisi: bloisi@diag.uniroma1.it
COACHES
Merry Christmas and Happy New Year from LabRoCoCo!
EU ROBOTICS WEEK 2015
Roberto Capobianco's paper has been accepted at ECMR 2015!
CALL FOR PAPERS
*** IMPORTANT DATES ***
- Paper Submission: July 10, 2015
- Notification: September 7, 2015
- Camera Ready: September 12, 2015
*** TOPICS AND OBJECTIVES ***
Environment awareness and conservation is an epoch-making subject in our society. Many scientific fields have contributed to size and address this concern. In the last 20 years many specific environmental missions pollution monitoring, soils conservation, natural disasters research, nuclear and radiation accidents using air, ground and underwater robots have been reported. This robots have been shipped with different sensory systems able to sense and gather biophysical data from broad areas for further analysis and study. This special session dedicated to environmental robotics will present late and future research within this field. Topics include, but are not limited to:
- João Valente, Universidad Carlos III de Madrid, Spain (jvalente@ing.uc3m.es)
OBERSEMINAR

AAMAS
RoCKIn Camp 2015
The RoCKIn Camp 2015, organized by UNIROMA1 and held in Peccioli (Italy) from 18th to 22nd of March, has been designed as a consistent follow up of the previous Camp 2014, held in Rome from 26th to 30th January 2014. Many of the best teams that participated at the previous camp attended also the RoCKIn Camp 2015.
Differently from the RoCKIn Camp 2014, that has been structured as a week-long school with lectures and practical activities, the RoCKIn Camp 2015 put a special emphasis on the hands-on experience of the participants, encouraging each team to focus on specific RoCKIn task and functionality benchmarks in order to improve their performances during the camp and to achieve the best possible results.
The RoCKIn Camp 2015 has been organized at the ECHORD++ Robotics Innovation Facility (RIFs) of Peccioli (Italy). Teams gained access to the state-of-the-art ECHORD++ domestic test bed (Figure 1) and to the RoCKIn industrial test bed, and had the chance to practice and improve their performance in the task and functionality benchmarks. The domestic test bed was equipped with the RoCKIn ground truth system provided by Milan Polytechnic (POLIMI) for data gathering and allowed teams to get detailed feedback on their performance.



Fablab
Prove di #Fablab a Città della Scienza al workshop formativo organizzato nell'ambito di #TechnologyBiz e promosso da Città della Scienza in collaborazione con la Sapienza - Università di Roma – Dipartimento di Ingegneria informatica automatica e gestionale “Antonio Ruberti. Il workshop è strutturato in due giornate e prevede la costruzione e la programmazione di un prototipo di robot low-cost con una base mobile, per il quale è stato sviluppato dalla Sapienza un kit open e basso costo, che garantisce uno standard di prestazione elevato. Per ulteriori informazioni, visita la pagina Facebook.
LabRoCoCo takes part to the workshop #TechnologyBiz which is sponsored by Città della Scienza. The workshop will last two days: a low-cost robot will be programed. A low-cost open kit developed by Sapienza will anyway guarantee high standard performances. For further information, please visit the Facebook page.









Flourish H2020 project first sunflowers data set
The LabRoCoCo team went to the sunflowers field expressly prepared by the ASSAM team for the Flourish project (10 hectares).
The purpose of the visit was to capture a first dataset of the field with the plants still small.


We used a temporary setup, composed by a Pioneer3 robot with the
following sensors (see the robot-X.jpg images in the attached archive):
-A VISensor (stereo camera+IMU), looking forward/ground, height ~80 cm
-A Hokuyo UTM-30LX laser, looking forward/ground, height ~80 cm
-An UBLOX GPS
-An USB3 color camera (1920x1200), looking down, height ~80 cm
-Robot odometry
![]()
The goal of the Flourish project is to bridge the gap between the current and desired capabilities of agricultural robots by developing an adaptable robotic solution for precision farming.
The Flourish project is funded by the European Community's Horizon 2020 programme under grant agreement no 644227-Flourish.
CONCEPT:
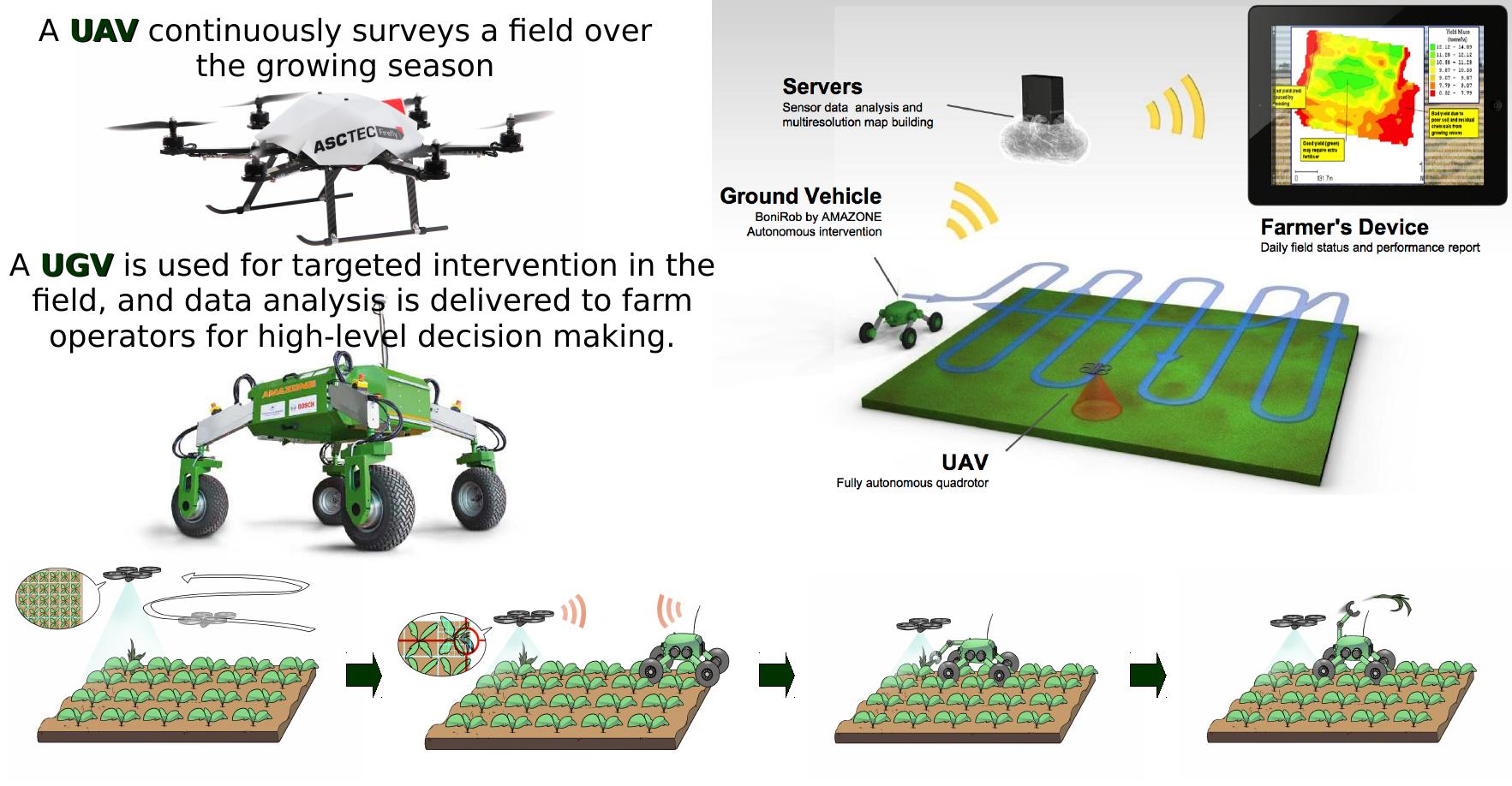
USE CASES:

LabRoCoCo partecipa al Workshop “MARRTINO”!
LabRoCoCo takes part to the Workshop “MARRTINO”!

Per ulteriori informazioni: http://www.tbiz.it/events/marrtino-come-costruire-un-robot-low-cost-dupl...
For further information: http://www.tbiz.it/events/marrtino-come-costruire-un-robot-low-cost-dupl...
NICOP Project Meeting (16/17 June 2015)


COACHES Project Meeting (11/12 June 2015)
Rome Drone Expo 2015 (29/31 May 2015)
Great success for LabROCOCO @ Rome Drone Expo 2015!

LabRoCoCo & Andrea Lo Cicero (famous rugby player!) at Rome Drone Expo 2015
Metro Italia interview

Rai news 24 interview

Visitors at our stand

LabRoCoCo Staff at Rome Drone Expo 2015
LabRoCoCo and DIAG at Rome Drone Expo 2015 (29/31 May 2015)

The Department of Computer, Control, and Management Engineering “Antonio Ruberti” (DIAG) at Sapienza University of Rome participates as exhibitor, within the European Horizon 2020 project FLOURISH, at Roma Drone Expo&Show 2015, that will take place at Aeroporto dell'Urbe in Rome from May 29th to May 31st 2015.
Roma Drone Expo&Show is the biggest event in Italy dedicated to the world of drones.
FLOURISH project http://flourish.informatik.uni-freiburg.de
Roma Drone Expo&Show http://www.romadrone.it
Il Dipartimento di Ingegneria Informatica, Automatica e Gestionale “Antonio Ruberti” (DIAG) dell'Università di Roma “La Sapienza” parteciperà come espositore, nell'ambito del progetto Europeo Horizon 2020 FLOURISH, alla manifestazione Roma Drone Expo&Show 2015 che si terrà presso l'Aeroporto dell'Urbe dal 29 al 31 Maggio 2015.
Nata nel 2014 e giunta alla sua 2a edizione, la manifestazione Roma Drone Expo&Show è dedicata al mondo dei droni e della robotica. La manifestazione prevede un ampio spazio espositivo pari circa a 12 mila mq con diverse aree specializzate, tra le quali scuole di volo, droni sportivi e amatoriali, istituzioni e aziende aeronautiche. Sarà inoltre possibile assistere a diversi voli dimostrativi di droni sia ad ala fissa che multi-rotore.
Progetto FLOURISH http://flourish.informatik.uni-freiburg.de
Roma Drone Expo&Show http://www.romadrone.it